
Introduction
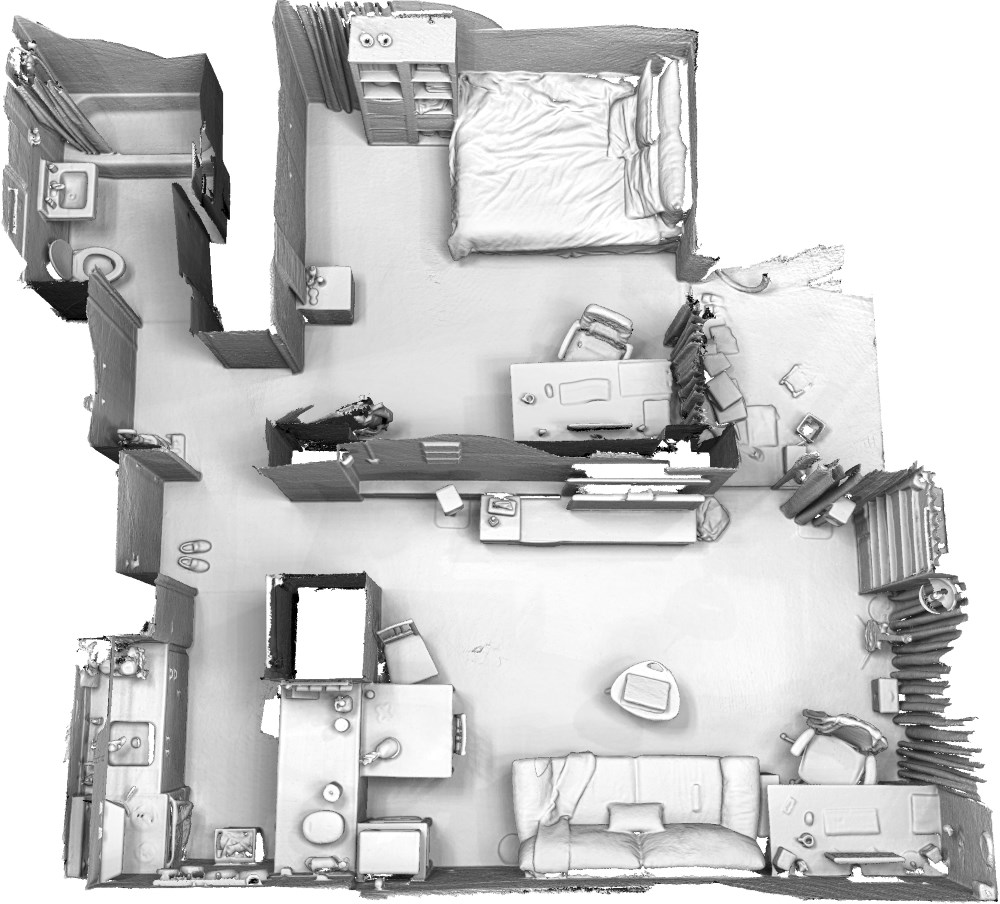
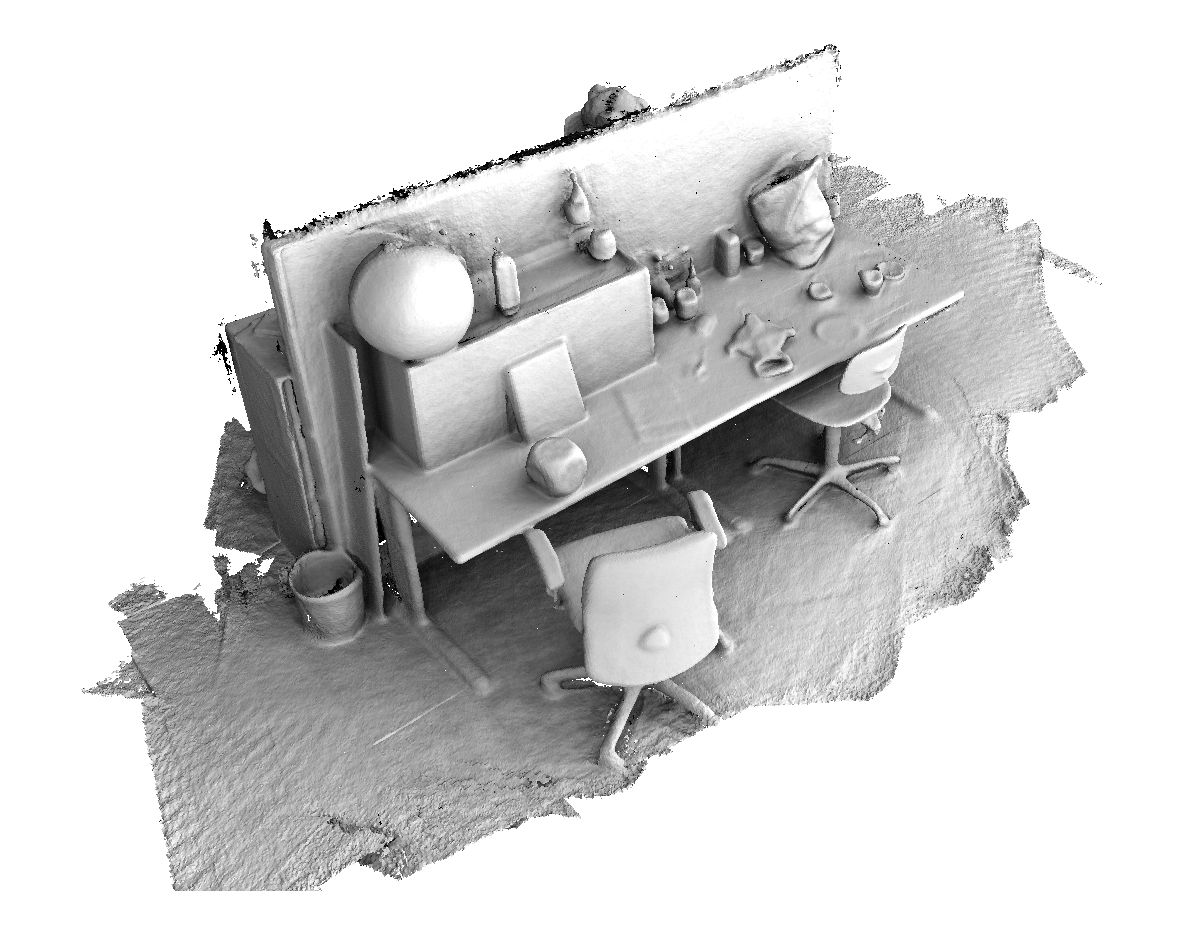
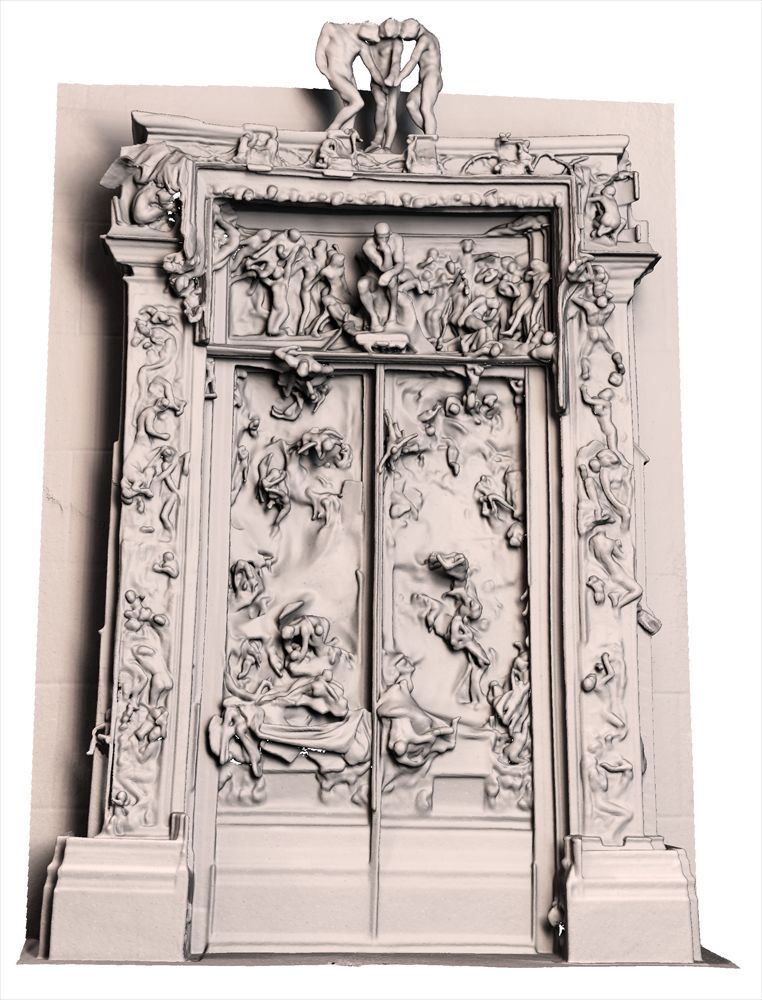
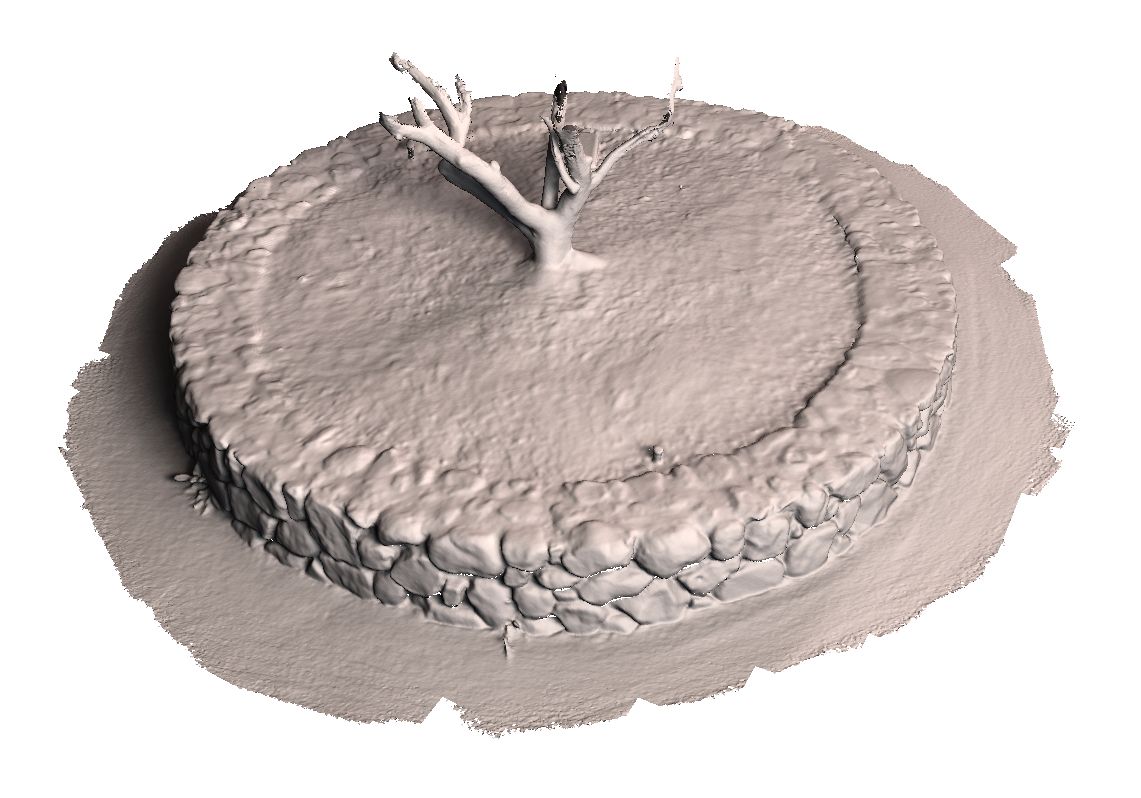
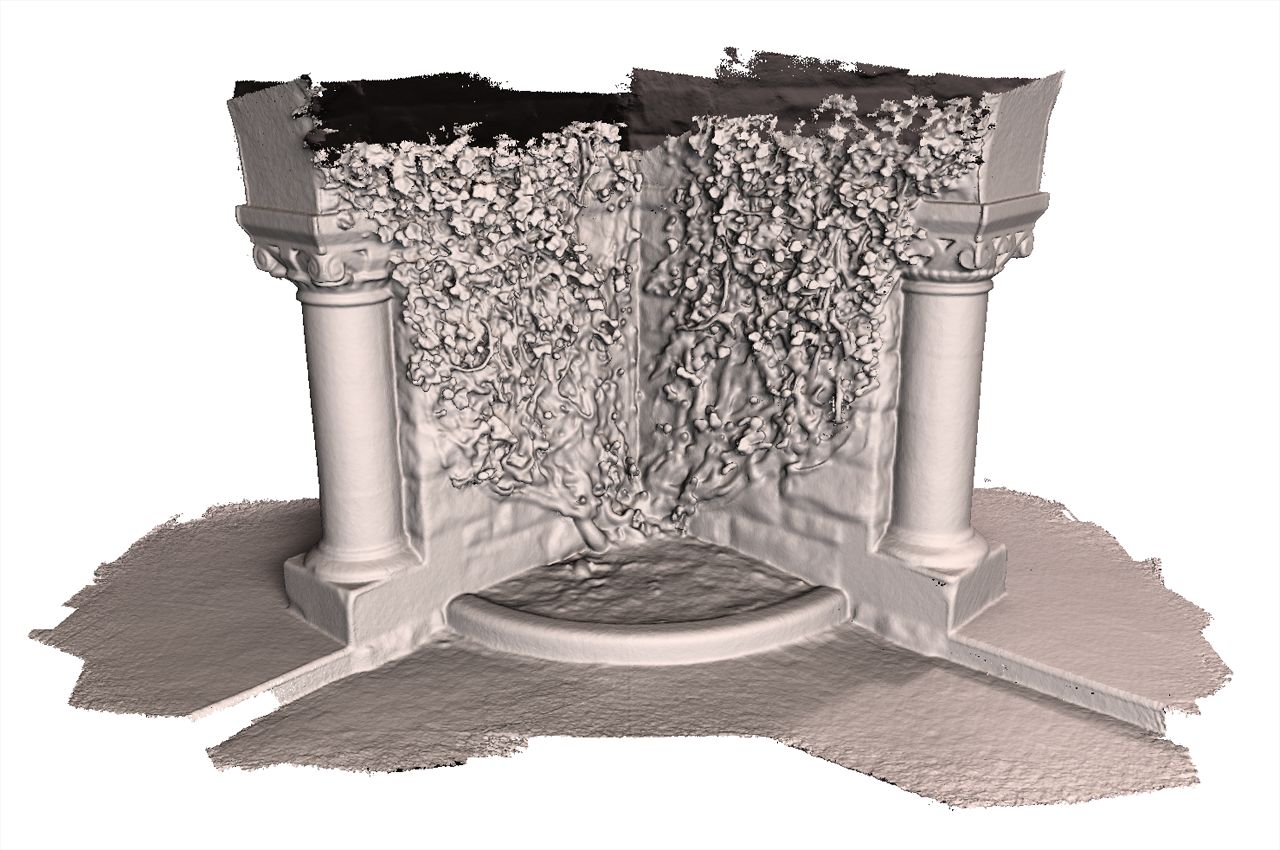
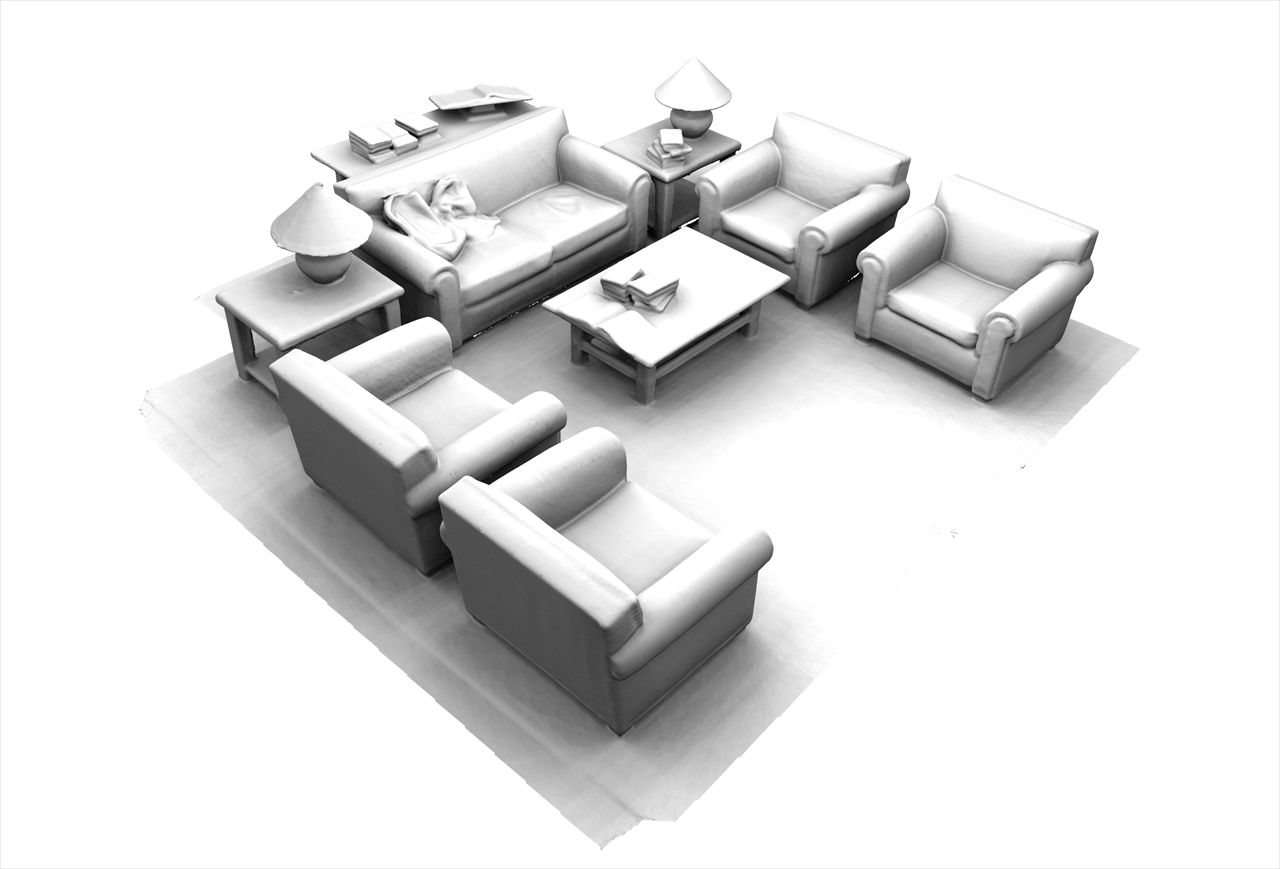
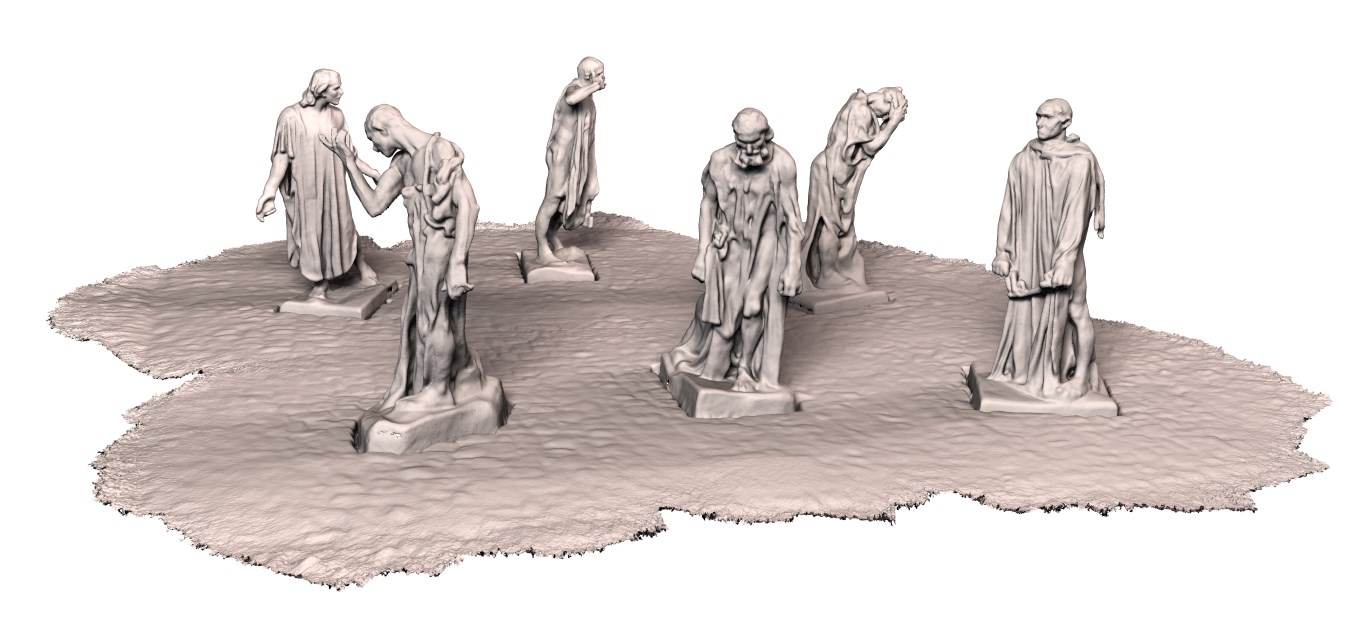
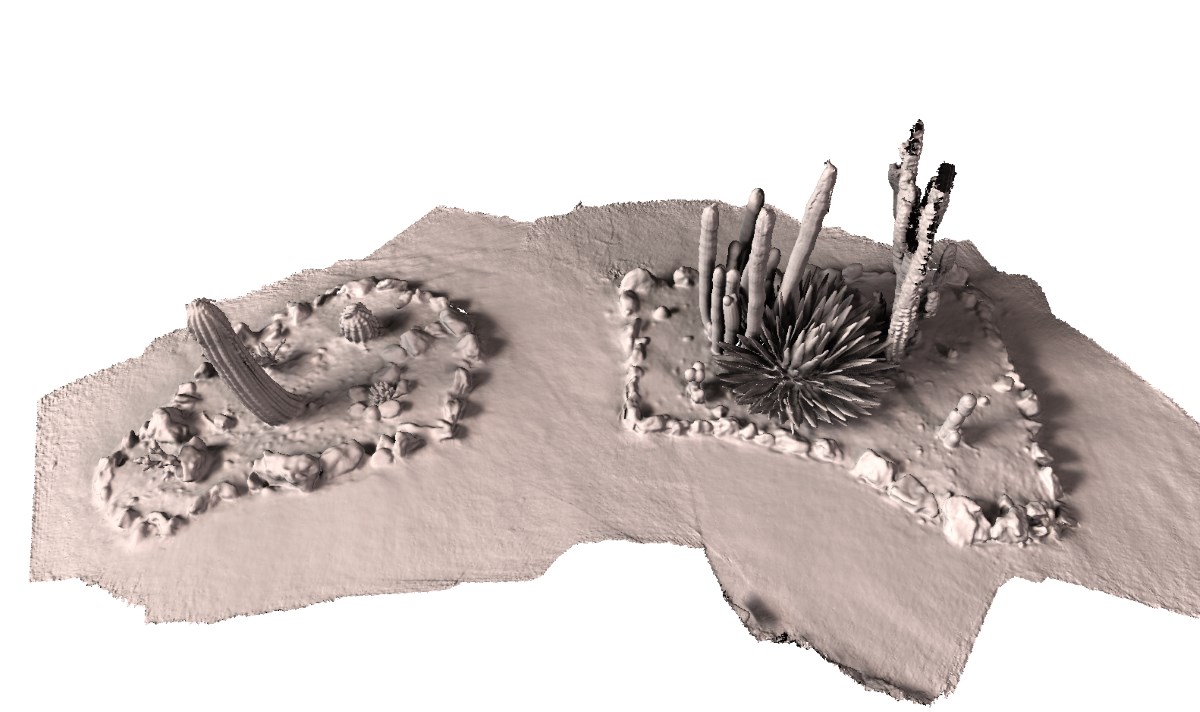
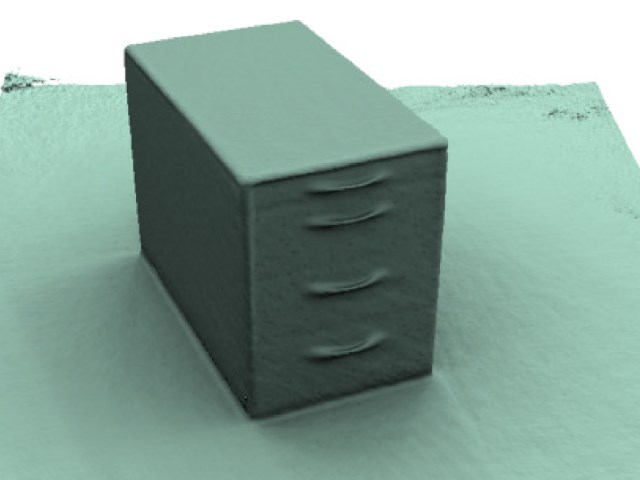
We have developed a system to reconstruct detailed scene geometry from range video. Range data produced by commodity handheld cameras suffers from high-frequency errors and low-frequency distortion. In addition, both the camera pose trajectory and the environment map are unknown. We took inspiration from previous research in computer graphics, computer vision, and robotics. We have developed a number of ideas and built the state-of-the-art offline scene reconstruction system.
Feel free to send us an email if you have any thoughts about this project: Qianyi Zhou (Qianyi.Zhou@gmail.com) and Vladlen Koltun (vkoltun@gmail.com)
License
We provide code and executables for our 3D scene reconstruction system. The code and the executables are released under the MIT license. In general, you can use this for any purpose, including commercial applications, with proper attribution. We are releasing this system in hope that it will be useful in many settings. If you do something interesting based on our work, please acknowledge it. We'll be happy to know about various applications, feel free to send us an email and tell us about your work.
Resource
We release the executable package, source code, and data. Use them with proper attribution.
Reconstruction System 1.1 Source Code Data How to Cite Our Paper
We have created additional datasets to validate our system, including a synthetic augmented ICL-NUIM dataset and a large dataset of object scans with 10,000 dedicated 3D scans and 398 reconstructed mesh models.
Augmented ICL-NUIM Dataset A Large Dataset of Object Scans
We are very interested in good global geometric registration algorithms so we set up an evaluation benchmark.
Global Geometric Registration Evaluation
We have released source code of two state-of-the-art global registration methods. One is based on PCL RANSAC. The other is based on our ECCV 2016 paper "Fast Global Registration". The latter is a couple of magnitude faster than the former while being the same accurate.
Video Gallery
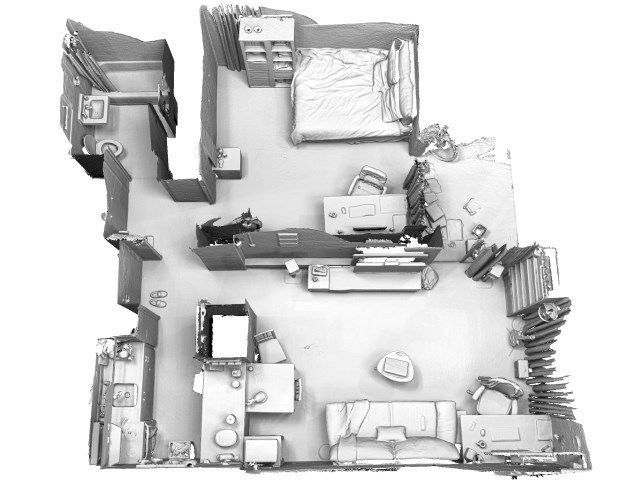

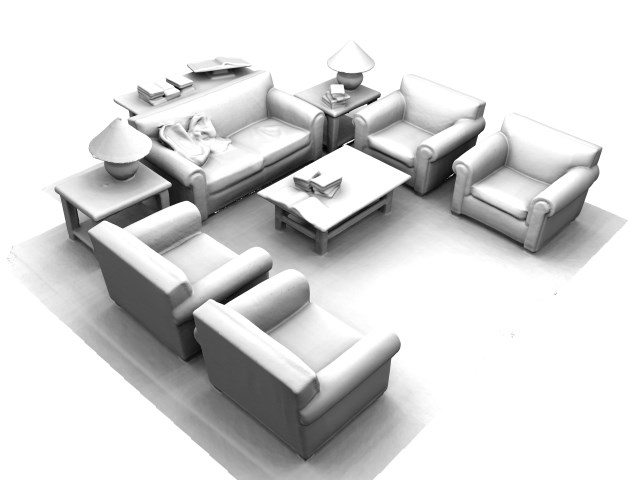

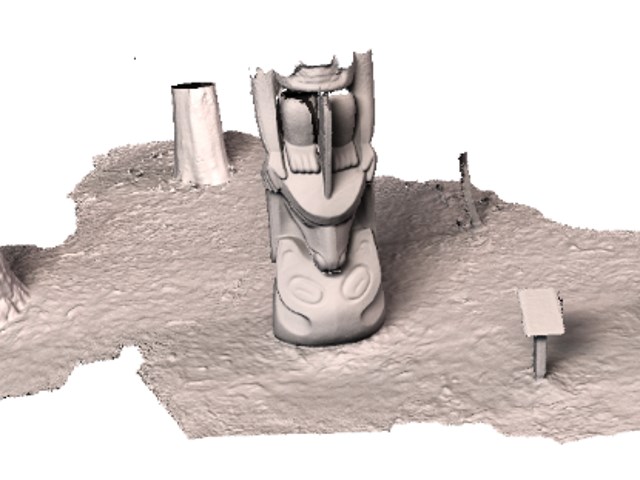
Image Gallery









List of Papers
Robust Reconstruction of Indoor Scenes
Sungjoon Choi, Qian-Yi Zhou and Vladlen Koltun
CVPR 2015
Color Map Optimization for 3D Reconstruction with Consumer Depth Cameras
Qian-Yi Zhou and Vladlen Koltun
SIGGRAPH 2014

Simultaneous Localization and Calibration: Self-Calibration of Consumer Depth Cameras
Qian-Yi Zhou and Vladlen Koltun
CVPR 2014

Elastic Fragments for Dense Scene Reconstruction
Qian-Yi Zhou, Stephen Miller and Vladlen Koltun
CVPR 2014 (oral paper, acceptance rate 2.5%)